垂直吸泵 V2.0
适配型号:myCobot 280、myPalletizer 260、mechArm 270
产品图示

规格说明
| 名称 | myCobot 垂直吸泵 V2.0 |
|---|---|
| 型号 | myCobot_suctionPump_V2.0_grey |
| 材料 | ABS 注塑 |
| 颜色 | 白色 |
| 尺寸 | 吸泵盒:72x52x37 吸泵末端:63x24.5x26.7 |
| 吸盘数量 | 1 |
| 吸盘尺寸 | 直径 20mm |
| 吸取重量 | 150g |
| 动力源设备 | 吸泵盒 |
| 使用寿命 | 一年 |
| 固定方式 | 乐高连接件 |
| 控制接口 | IO 控制 |
| 使用环境要求 | 常温常压 |
| 适用设备 | ER myCobot 280 系列, ER myPalletizer 260 系列 ,ER mechArm 270 系列 ,ER myBuddy 280 系列 |
吸泵 : 吸附物体使用
简介
吸泵,即真空吸附泵,具备一进一出的抽气嘴、排气嘴各一个,它结构简单、体积小巧、使用方便、噪音较低、并有良好的自吸能力等优点。通过控制吸泵套件作为机械臂的末端执行器,执行吸附物体的功能。
吸泵配件:电源线 x1、杜邦线 x10、一入两出连接线 x1、乐高科技件 x 若干
工作原理
- 吸取物品时:气泵启动抽气吸附物品即可停止,短时不会漏气。
- 放下物品时:电子阀门启动,泄气阀门打开,空气进入真空吸盘脱离被吸物品。
适用物体
- 纸片/塑料片
- 平面光滑物体
- 卡片等
安装使用
检查配件包东西是否齐全:乐高连接件、杜邦线、双头吸泵

双头吸泵安装:
结构安装:
将乐高连接件插入吸泵上预留的插孔中:
根据需要可以选择两种不同方向的安装方式
法 1 法 2
法 2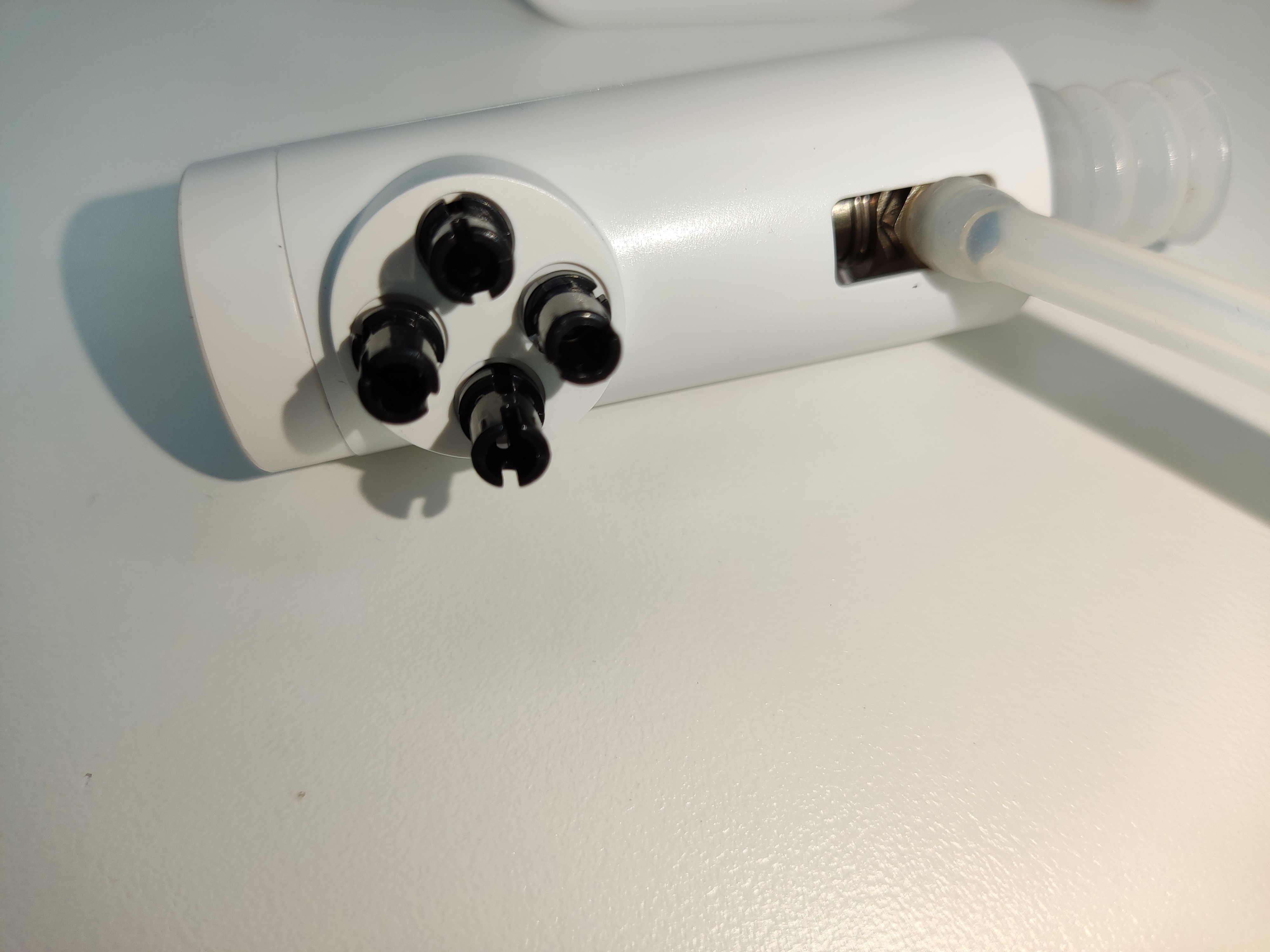
将插好连接件的吸泵对准机械臂末端插孔插入:
法 1
 法 2
法 2
电气连接:
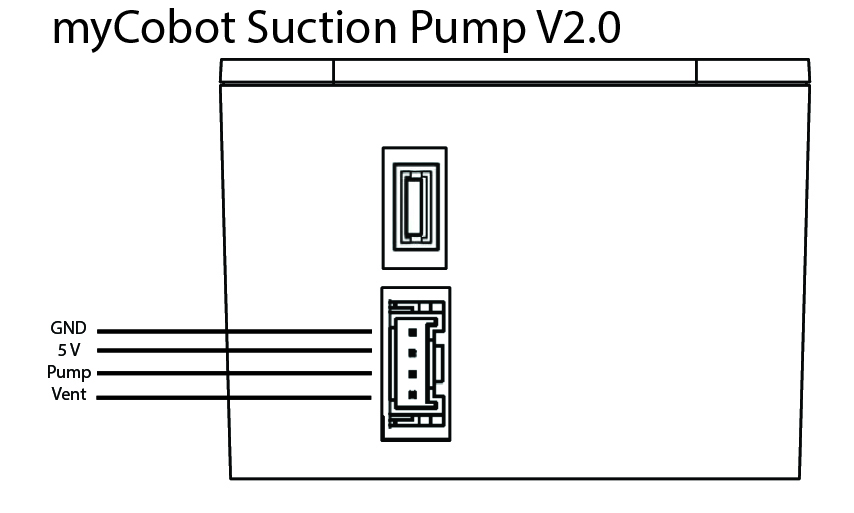
选出公-母杜邦线,母头端插入吸泵方盒上标有引脚的插口:
公-母杜邦线:
 注意图中的杜邦线颜色和引脚的对应关系:
注意图中的杜邦线颜色和引脚的对应关系:

公头按给出的对应关系插入机械臂底座引脚:

左侧为吸泵引脚,右侧为机械臂引脚
GND -> GND
5V -> 5V
G2 -> 21
G5 -> 20
软件驱动测试:
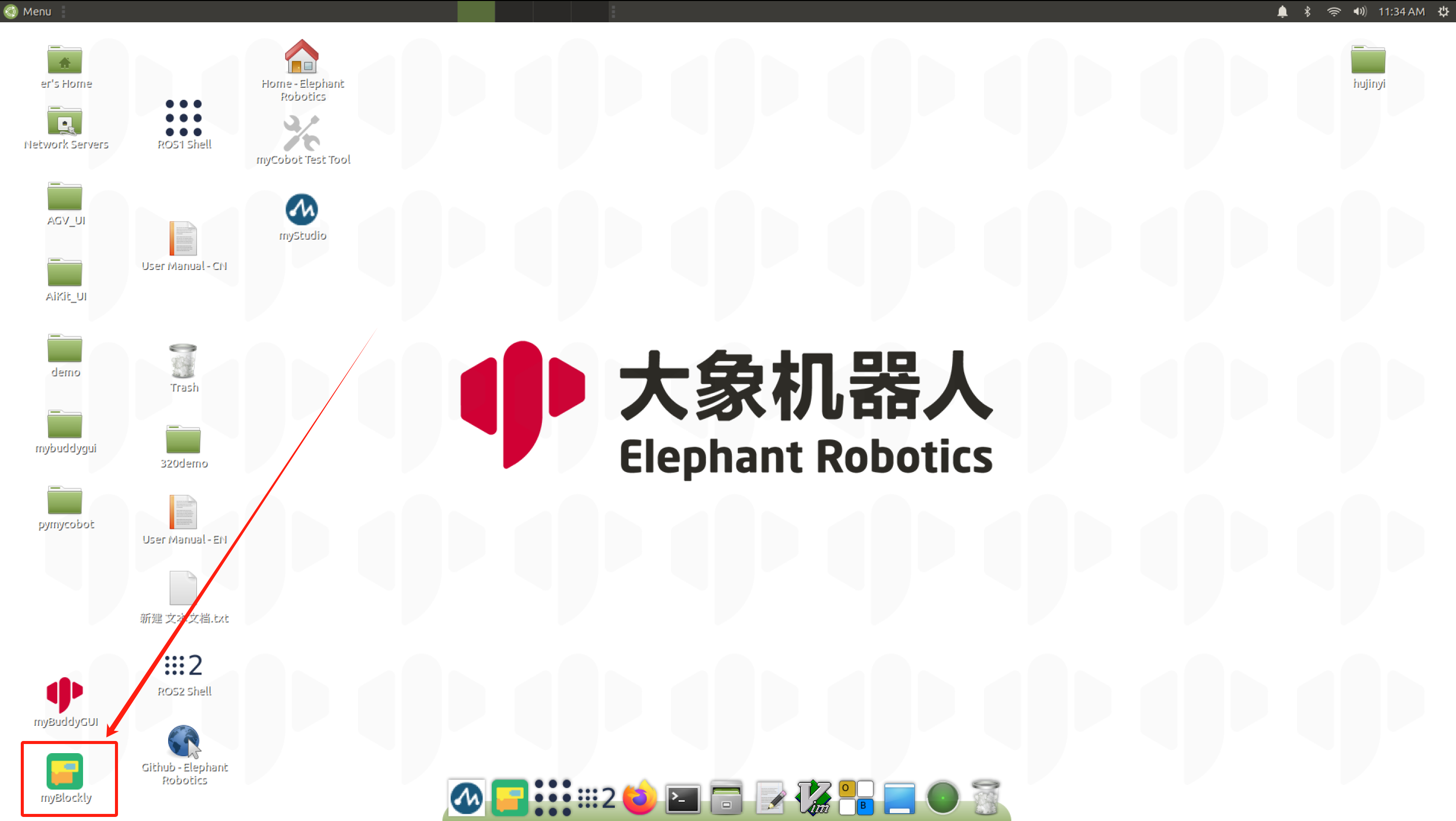
测试夹爪安装后是否可用,使用 myBlockly 测试 myblockly 下载
- 确认结构及电气连接都完成后,启动机械臂,出现图形界面后打开 myblockly 软件
- 修改波特率为 1000000

- 在左侧列表找到
Raspi-GPIO,选择设置模式模块
- 拖动模块连接在
初始化mycobot模块下面,选择 BCM 模式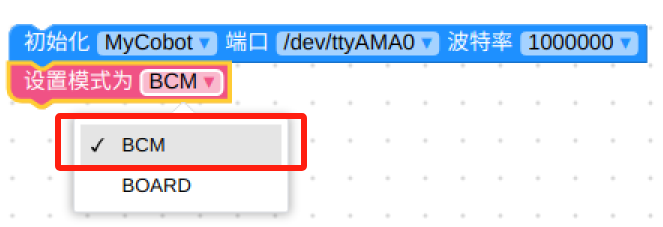
- 在
时间,选择睡眠模块
- 设置时间为
1 秒,目的是给出缓冲时间
- 选择
设置引脚模式模块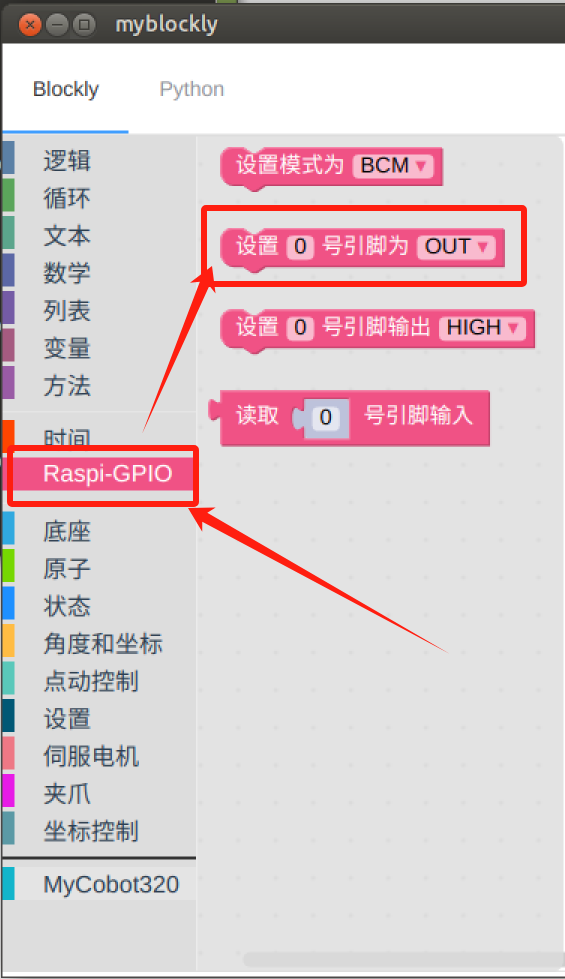
- 将
20号引脚设置为OUT,即输出模式
- 选择
设置引脚输出模块
- 将
20号引脚输出设为LOW低电平,低电平时吸泵工作
- 选择
睡眠模块,设置时间为2秒,目的是留出夹爪运动时间
- 设置
20号引脚输出为HIGH,此时吸泵会停止工作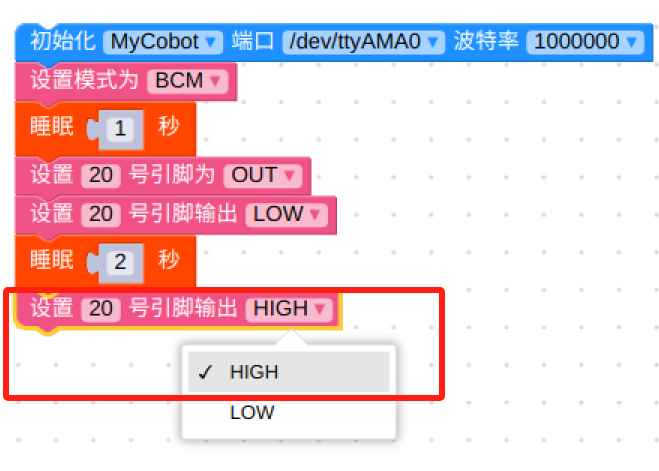
- 最终结果如下,点击右上角绿色运行按钮运行
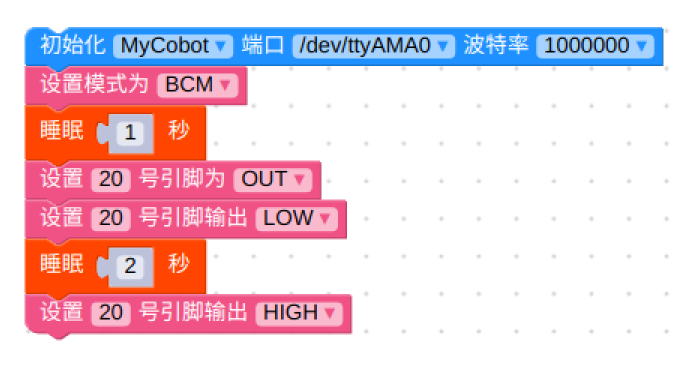
可以看到吸泵开启,运行 2 秒之后停止
第二次运行时,会提示this channel is already in use, continuing anyway,属正常现象,python 开发部分会说明规避方法
- 确认结构及电气连接都完成后,启动机械臂,出现图形界面后打开 myblockly 软件
编程开发:
使用 python 对吸泵进行编程开发 python 环境下载
新建 python 文件:
Ctrl + Alt + T打开命令行,输入:gedit pump_double.py
文件名字可以根据需要修改
进行功能编程:
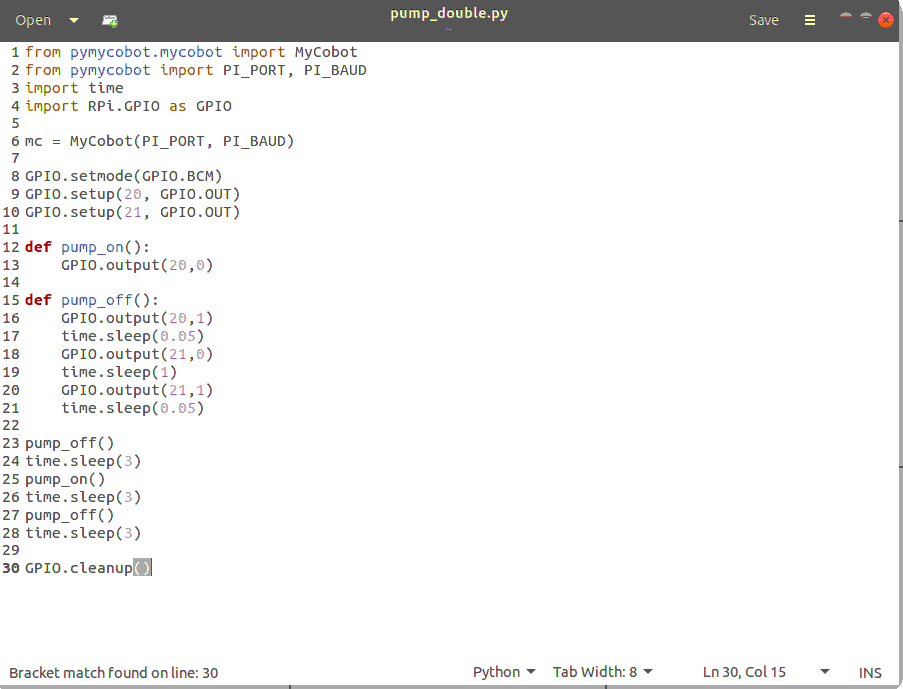
代码如下:
- 280-M5 版本:
from pymycobot import MyCobot280 import time # 初始化一个MyCobot280对象 mc = MyCobot280("COM3", 115200) # 开启吸泵 def pump_on(): # 打开电磁阀 mc.set_basic_output(5, 0) time.sleep(0.05) # 停止吸泵 def pump_off(): # 关闭电磁阀 mc.set_basic_output(5, 1) time.sleep(0.05) # 泄气阀门开始工作 mc.set_basic_output(2, 0) time.sleep(1) mc.set_basic_output(2, 1) time.sleep(0.05) pump_off() time.sleep(3) pump_on() time.sleep(3) pump_off() time.sleep(3) GPIO.cleanup() # 释放 pin channel- 280-Pi 版本:
from pymycobot import MyCobot280 from pymycobot import PI_PORT, PI_BAUD # 当使用树莓派版本的mycobot时,可以引用这两个变量进行MyCobot280初始化 import time import RPi.GPIO as GPIO # 初始化一个MyCobot280对象 mc = MyCobot280(PI_PORT, PI_BAUD) # 初始化 GPIO.setmode(GPIO.BCM) # 引脚20/21分别控制电磁阀和泄气阀门 GPIO.setup(20, GPIO.OUT) GPIO.setup(21, GPIO.OUT) # 开启吸泵 def pump_on(): # 打开电磁阀 GPIO.output(20,0) # 停止吸泵 def pump_off(): # 关闭电磁阀 GPIO.output(20,1) time.sleep(0.05) # 打开泄气阀门 GPIO.output(21,0) time.sleep(1) GPIO.output(21,1) time.sleep(0.05) pump_off() time.sleep(3) pump_on() time.sleep(3) pump_off() time.sleep(3) GPIO.cleanup() # 释放 pin channel
更多案例参考和运行结果视频请查看 使用案例
淘宝链接:https://item.taobao.com/item.htm?spm=a1z10.5-c-s.0.0.6945364bve0QX4&id=637681935217